|
I am a Computer Vision & Machine Learning Engineer at Apple Munich . Previously, I completed my PhD at the Technical University of Munich, Chair of Computer Aided Medical Procedures and Augmented Reality, under the supervision of Federico Tombari and Nassir Navab. My research focuses on 3D computer vision, scene understanding, and related applications, including robotics and AR/VR. Email / CV / Google Scholar / University / Twitter / LinkedIn |

|
|
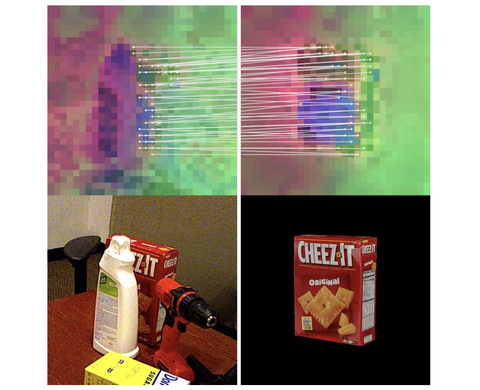
Evin Pınar Örnek, Yann Labbé, Bugra Tekin, Lingni Ma, Cem Keskin, Christian Forster, Tomas Hodan ECCV, 2024 |
|
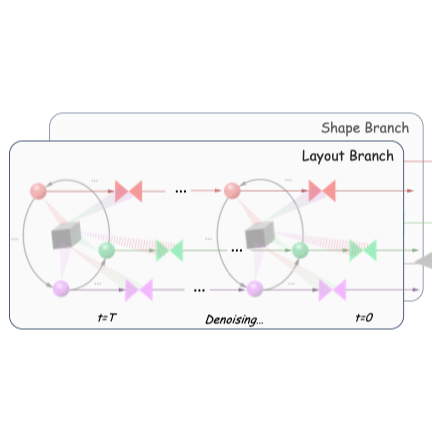
Guangyao Zhai, Evin Pınar Örnek, Dave Zhenyu Chen, Ruotong Liao, Yan Di, Nassir Navab, Federico Tombari, Benjamin Busam ECCV, 2024 |
|
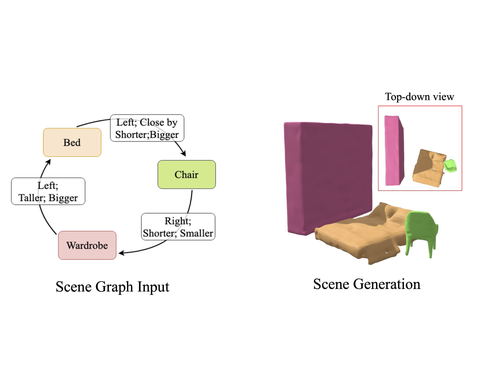
Guangyao Zhai*, Evin Pınar Örnek*, Shun-Cheng Wu, Yan Di, Federico Tombari, Nassir Navab, Benjamin Busam *Equal contribution NeurIPS, 2023 |
|
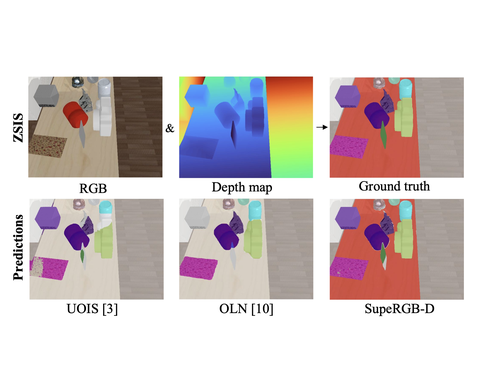
Evin Pınar Örnek, Aravindhan K Krishnan, Shreekant Gayaka, Cheng-Hao Kuo, Arnie Sen, Nassir Navab, Federico Tombari IEEE Robotics and Automation Letters, 2023 |
|
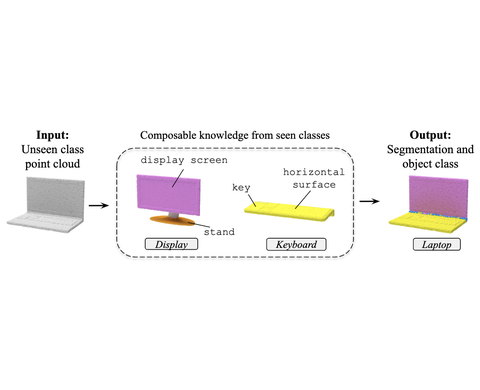
Muhammad Ferjad Naeem*, Evin Pınar Örnek*, Yongqin Xian, Luc Van Gool, Federico Tombari *Equal contribution ECCV, 2022 |
|
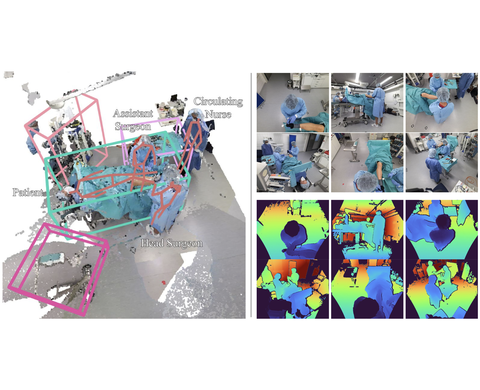
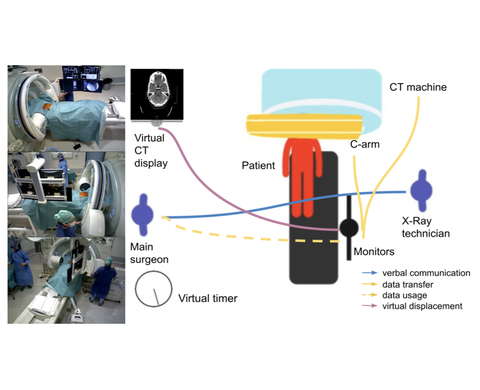
Ege Özsoy*, Evin Pınar Örnek*, Ulrich Eck, Tobias Czempiel, Federico Tombari, Nassir Navab *Equal contribution Medical Image Computing and Computer Assisted Intervention, Orals, 2022 |
|
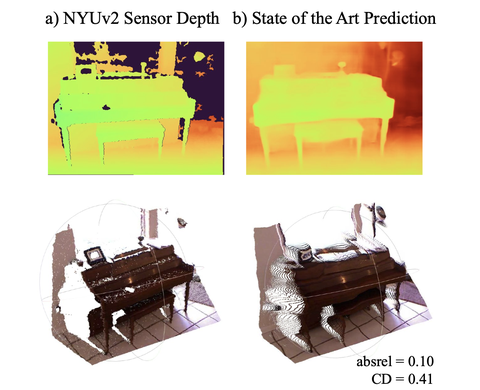
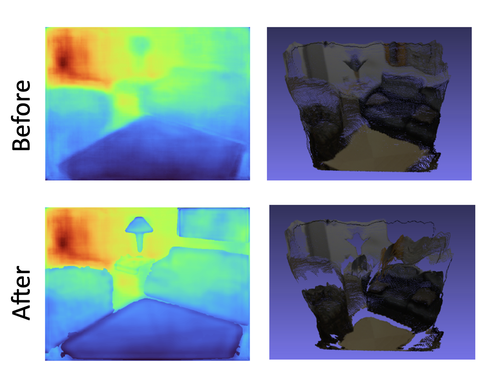
Evin Pınar Örnek*, Shristi Mudgal*, Johanna Wald, Yida Wang, Nassir Navab, Federico Tombari *Equal contribution Arxiv, 2022 |
|
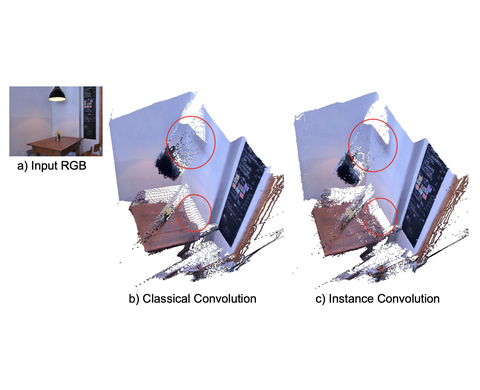
Enis Simsar*, Evin Pınar Örnek*, Fabian Manhardt, Helisa Dhamo, Nassir Navab, Federico Tombari *Equal contribution IEEE Robotics and Automation Letters, 2022 |
|
Ege Özsoy*, Evin Pınar Örnek*, Ulrich Eck, Federico Tombari, Nassir Navab *Equal contribution Arxiv, 2021 |
|
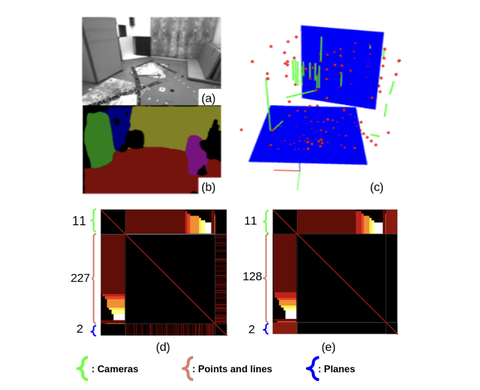
Xin Li, Yanyan Li, Evin Pınar Örnek, Jinlong Lin, Federico Tombari IEEE Robotics and Automation Letters, 2021 |
|
Evin Pınar Örnek Master's Thesis, TUM, 2020 |
|
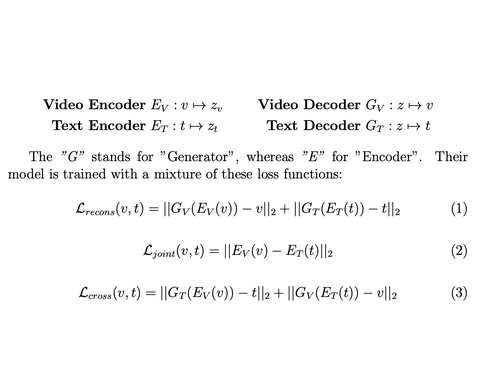
Evin Pınar Örnek, Marie-Francine Moens CVPR Workshop posters, 2020 |
|
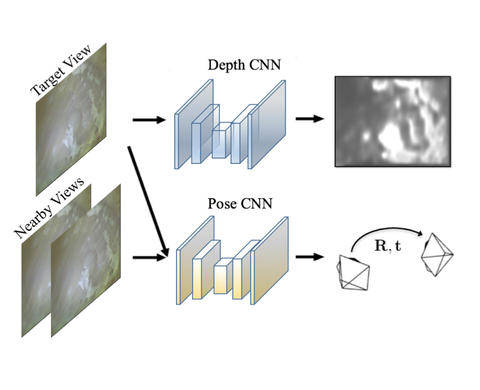
Mehmet Turan, Evin Pınar Örnek, Nail Ibrahimli, Can Giracoglu, Yasin Almalioglu, Mehmet Fatih Yanik, Metin Sitti IROS, 2018 |
|
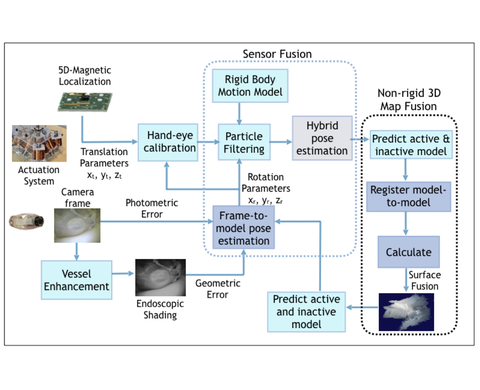
Mehmet Turan, Yasin Almalioglu, Evin Pınar Örnek, Helder Araujo, Mehmet Fatih Yanik, Metin Sitti IROS, 2018 |
|
The original template of this website's source code. |